
摘 要:為了實現小型無人傾轉旋翼機螺旋槳的可靠驅動,以ADuC7060 微控制器為核心,采用反電勢法設計了一種無位置傳感器無刷直流電機驅動器。利用mosFET 作為開關器件,給出了橋式逆變電路和位置檢測電路的原理圖。針對螺旋槳負載的特點,利用MATLAB 優化了三段式起動方法的起動加速曲線,并對轉子位置檢測電路中濾波電容產生的相移進行了補償。通過調試表明,無刷直流電機能夠帶載可靠起動,并通過PWM 平穩調速,驗證了設計的有效性。
1. 引言
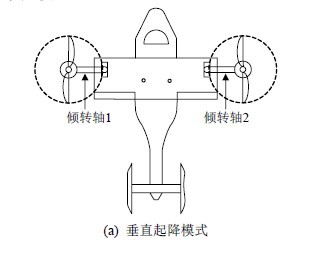
傾轉旋翼機是一種集固定翼飛機和直升機優點于一身的新型飛行器。通過傾轉軸帶動螺旋槳的傾轉,傾轉旋翼機可以實現垂直起降和水平飛行兩種模式的切換,因此與傳統飛機相比,傾轉旋翼機具有機動性強、載重量大、可垂直起降等優點[1]。近年來對傾轉旋翼機的研究已經成為航空領域的新熱點。目前,國內已經有研究機構開始試制小型樣機,并對傾轉旋翼機控制系統進行分析[2]。本文在制作了小型無人傾轉旋翼機結構的基礎上,根據旋翼機的設計需求,選用運行可靠、電磁噪聲小的無刷直流電機作為驅動電機,并采用ADuC7060 單片機為控制芯片,對傾轉旋翼機的驅動系統進行了設計。
2. 傾轉旋翼機系統結構
傾轉旋翼機的結構如圖1 所示,分為垂直起降模式和水平飛行模式。系統采用ADXRS612 陀螺儀和ADIS16210 加速度計作為傳感器,為控制器提供位置姿態信號,在負反饋機制作用下,驅動執行器進行姿態調節。以垂直起降模式為例,當兩傾轉軸同向轉動時,就可以實現俯仰姿態的調節;當兩傾轉軸反向轉動時,就會為機體提供一個扭矩,實現偏航姿態的調節;而當左右兩個電機轉速差動時,就實現滾轉姿態的調節。可見,無刷直流電機的平穩調速對旋翼機系統至關重要。
3. 無刷直流電機的驅動策略
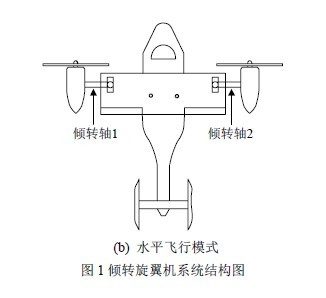
本設計中采用反電勢法無位置傳感器無刷直流電機驅動策略。反電勢法不需要借助位置傳感器,僅通過檢測反電勢信號就可以判斷轉子位置,具有結構簡單、可靠性高等優點[3,4]。如圖2 所示,為A 相繞組的反電勢在一個電周期內的波形,其中橫軸代表當前運行時刻的電角度,縱軸代表A 相繞組產生的反電勢Ea。從圖中可以看出,當檢測到反電勢信號過零點后,延遲30°電角度即是換相點。對于三相繞組電機,每隔60°電角度就會產生一個反電勢過零點,過零點信號被ADuC7060 微控制器檢測并處理后,就可以產生相應的驅動信號驅動電機連續運轉。
4. 無刷直流電機驅動系統硬件設計
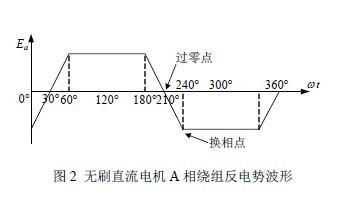
本系統采用電壓為12 V 的模型動力電池供電。硬件連接框圖如圖3 所示,ADuC7060 微控制器通過I2C接口接收來自主控制器發送的控制信號,根據轉速要求改變PWM 占空比,并實時檢測反電勢過零信號,進而通過橋式逆變電路驅動電機調速。為了保證運行安全,系統中還利用采樣電阻設計了欠壓/過流檢測電路,以便在電池欠壓和電機堵轉過流時為系統提供保護。下面將對主要單元電路分別進行介紹。
4.1 微控制器的選擇
本設計中微控制器采用的是ADI 公司生產的ADuC7060 單片機。ADuC7060 采用ARM7TDMI 內核,其內部集成了一個三相PWM 接口,16 個通用I/O 端口,兩個獨立的多通道24 位Σ-ΔADC,以及通用定時器和I2C 串行接口等資源,性能十分優越。當工作在10.24 MHz 時,其功耗一般僅為25 mW,滿足模型機系統對低功耗的要求。
4.2 三相橋式驅動電路
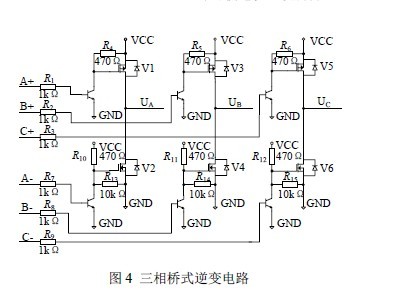
在本系統中,逆變電路為三相橋式結構,采用上橋臂單邊PWM 控制。如圖4 所示,圖中V1~V6 為功率MOSFET,上橋臂選用型號為IRFR5305 的P 溝道功率MOSFET,當PWM 輸出高電平時導通;下橋臂選用型號為IRFR1205 的N溝道功率MOSFET,當I/O 端口輸出低電平時導通。在每個功率MOSFET 的前端都放置了一個三極管,目的是提高微控制器端口的驅動能力,保證MOSFET 的可靠開關。在一個電周期內, 控制導通相序為AB→AC→BC→BA→CA→CB,即可使電機連續旋轉。
4.3 反電勢過零檢測電路
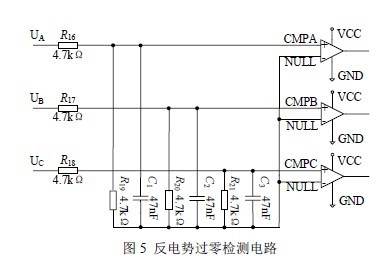
反電勢檢測電路如圖5 所示,UA、 UB 和 UC 與電機繞組引出端連接,經過分壓網絡后得到分壓點CMPA、CMPB 和 CMPC,圖中電容起濾波作用。同時圖中電阻構成了一個星型網絡,電路中NULL 點可以用來虛擬中性點。這樣只要利用比較器成對比較分壓點與虛擬中性點電壓,即可檢測反電勢信號的過零點。
5. 無刷直流電機驅動系統軟件設計
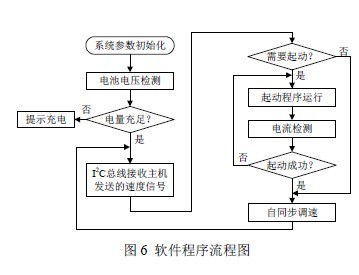
無刷直流電機驅動系統軟件流程如圖6 所示,主要分為起動和調速兩部分。由于電機轉速與螺旋槳升力之間難以建立精確關系[5],所以設計中不對電機本身單獨進行閉環控制,而是根據陀螺儀提供的反饋信號,對旋翼機整體進行閉環控制。當旋翼機控制器發出速度信號后,由ADuC7060 微控制器I2C 總線接收。如果速度信號從零開始增大,則需要進行起動,否則跳過起動程序,直接根據速度信號改變PWM 的占空比,調節螺旋槳的轉速。
5.1 無刷直流電機的起動
反電勢信號在電機靜止或低速時難以檢測,因而電機起動時無法利用反電勢信號自主換相。本文采用“三段式起動”法進行起動設計,它分為預定位、外同步加速、運行狀態切換三個階段[6]。首先給任意兩相繞組通電一段時間,使轉子定位到已知的位置,然后利用微控制器產生頻率逐漸提高的驅動信號,使電機以類似步進電機的方式加速,待轉速達到可以產生清晰的反電勢信號后再切換到自同步運行狀態。“三段式起動”法的關鍵是保證外同步加速和切換時不產生失步。針對外同步加速過程,通常采用升壓升頻加速或恒壓升頻加速方式。升壓升頻方式需兼顧PWM 占空比及換相時間間隔與換相次數的關系,對于螺旋槳這類變轉矩負載較難進行優化設計。本文采用恒壓升頻方式設計了一種針對螺旋槳負載的加速曲線。考慮到對于電機系統有:

式中J 是系統的轉動慣量;θ 為轉子轉過的電角度;Tem 為電磁轉矩(與電樞電流成正比);T0 為空載阻轉矩;TL 為負載轉矩。在加速階段,一方面由于螺旋槳負載轉矩TL 隨轉速升高而增加;另一方面隨著轉速增加反電勢也增加,導致電樞電流降低引起Tem 減小,所以加速過程中應保證角加速度減小,才能使式(1)平衡。本設計中,結合實驗調試,利用MATLAB擬合了一條冪函數加速曲線,如圖7 所示,其中橫軸代表換相次數N(由于每次換相轉過60°電角度,故N正比于θ ),縱軸為換相時間間隔Δt 。
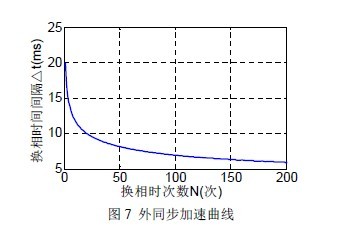
下面簡單介紹一下擬合方法,為簡便起見,選取三個待擬合的點。根據這三個點的特點,不妨分別稱它們為起始點、轉折點和切換點,其中從起始點到轉折點之間要求快速加速,保證起動速度;在轉折點之后曲線應平緩,減小波動以便于平穩切換到自同步運行,切換點的選取應以能產生清晰的反電勢信號為準。根據調試實驗,固定PWM 占空比為15%,選取起始點、轉折點和切換點坐標分別為(0,20)、(100,7.3)及(200,6),括號中第一個元為換相次數N,單位為次;第二個元為換相時間間隔Δt ,單位為毫秒。擬合的冪函數曲線表達式如式(2)所示。
5.2 電容滯后換相的補償
由于反電勢過零檢測電路中存在濾波電容,這會導致自同步運行階段檢測到的位置信號滯后于實際位置信號。為確保電機準確換相,需計算出滯后時間并對其進行補償。由反電勢過零檢測電路可得:
6. 實驗調試與分析
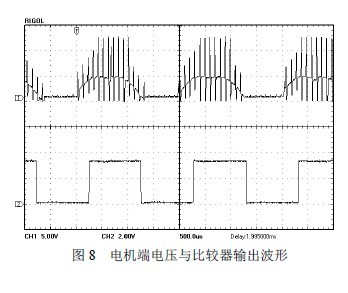
實驗電機采用XXD2212 型外轉子無刷直流電機,其額定電壓為12 V,最高空載轉速為12000 r/min。螺旋槳采用GF1045 高速槳。經反復實驗,電機可以成功帶載起動。圖8 是調節PWM 占空比為30%時,用RIGOL DS5202 型示波器測量的實驗波形,其中通道1為A 相端電壓波形,通道2 為A 相對應的比較器輸出波形,可見電機運轉平穩,調速性能良好。從圖中也可以看出,比較器提供的轉子位置信號略滯后于實際信號,驗證了相位補償的必要性。
7. 結束語
本文采用反電勢法設計了小型傾轉旋翼無人機無刷直流電機驅動系統,完成了硬件電路以及軟件的設計調試。通過實驗對電機起動加速曲線進行了擬合,并補償了濾波電容引起的相位滯后。調試結果表明,在負載為GF1045 螺旋槳條件下,該驅動器能驅動XXD2212 型無刷直流電機可靠起動,并能實現平穩調速,滿足旋翼機的設計要求。
參考文獻
[1] Martin D M, Demo J G, Daniel C D. The history of the XV
215 tilt rotor research aircraft: from concept to flight [R].
NASA SP2200024517, 2000: 12299.
[2] 徐昊. 傾轉旋翼機姿態控制問題研究[D]. 哈爾濱: 哈爾
濱工業大學, 2011.
[3] SU G J, MCKEEVER J W. Low-cost Sensorless Control
of Brushless DC Motors with Improved Speed
Range[J].IEEE Trans. on Power Electronics, 2004, 19(2):
296-302.
[4] 吳紅星, 葉宇驕, 倪天, 等. 無刷直流電機轉子位置檢
測技術綜述[J]. 微電機, 2011, 44(8): 75-76.
[5] 孟磊, 蔣宏, 羅俊, 等. 四旋翼飛行器無刷直流電機調
速系統的設計[J]. 電子設計工程, 2011, 19(12): 95-96.
[6] 廖承喜, 朱志杰, 翁微. 無刷直流電機三段式自起動關
鍵技術研究[J]. 電力電子技術, 2008, 42(5): 61-62.
作者簡介:
王巖,男,1988 年生,碩士研究生,主要研究方向:飛行器
控制
翟琨,女,1989 年生,碩士研究生,主要研究方向:電力電
子與電力傳動
葛文哲,男,1989 年生,碩士研究生,主要研究方向:電力
電子與電力傳動
羅晶,男,1963 年生,博士,副教授,主要研究方向:機電
控制,檢測技術
陳平,女,1963 年生,博士,副教





